
We build
Mars rovers
in Switzerland.
A full-scale Mars rover, designed and built from scratch each season by an interdisciplinary team of FHNW students — and driven to the European Rover Challenge.
Built new, from scratch.
One rover, one season, by the numbers.
- European Rover Challenge, 2024
- 1st
- Points scored — of 3,000 possible
- 2,258
- GPS. It finds its own way.
- 0
- Degrees of freedom — the arm, “Barbara”
- 6
- Independent motors: 4 steer, 4 drive
- 8
- Steering modes: Ackermann, crab, spin
- 3
- Top speed across the Marsyard
- 1.45 m/s
- Brand-new rover, every single year
- 1


Six systems, one machine.
Almost nothing on the rover is off-the-shelf — every subsystem is designed, built and programmed in-house, then fused over a single ROS 2 graph.
- Perception
- Blickfeld Qb2 LiDAR + ZED stereo
- Autonomy
- Plans its own route — no GPS
- Compute
- ROS 2 across 3× NVIDIA Jetson
- Steering
- Four-wheel independent (4WIS)
- Drive
- Four-wheel independent (4WID)
- Suspension
- Active — keeps the chassis level

A student-built Mars rover.
The FHNW Rover Team brings together students from mechanical engineering, electrical and information technology, computer science and bioanalytical sciences to develop a fully functional Mars rover over the course of a two-semester project. Each year the team designs a new machine from the ground up, capable of navigating rough terrain autonomously, collecting and analysing soil samples, and performing delicate technical maintenance tasks.
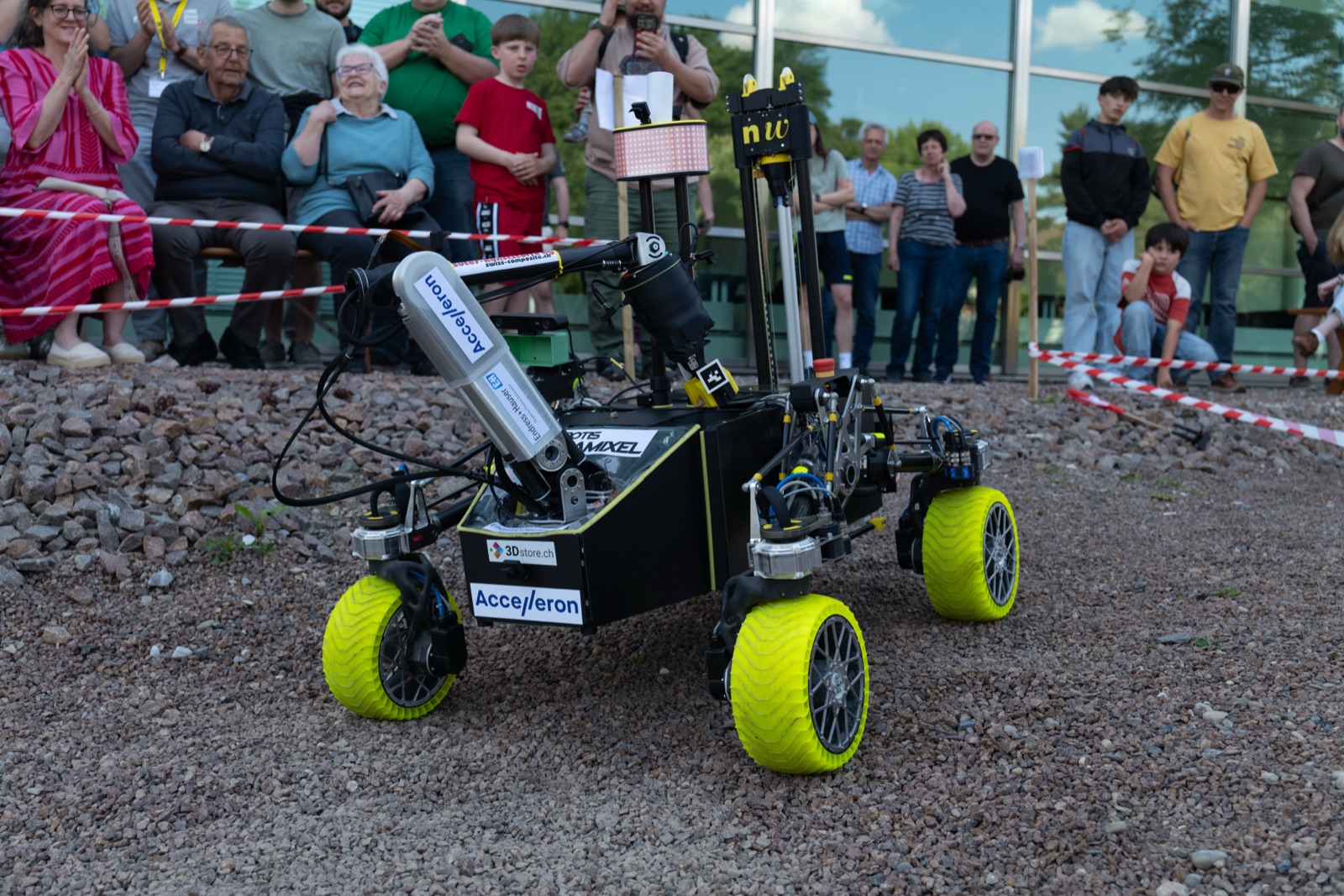
The rover is a genuinely complex robotic platform: four independently steered and independently driven wheels (4WIS/4WID) ride on an active suspension that keeps the chassis level over obstacles, a six-degree-of-freedom manipulator arm handles equipment and samples, and a ROS 2 software stack running on onboard NVIDIA Jetson computers fuses cameras, LiDAR, IMU and wheel odometry for perception and autonomous navigation.
The team trains under realistic conditions on its own Mars-like test terrain (a "Marscape") at the FHNW Brugg-Windisch campus, then travels to Poland each September to put the rover through the demanding missions of the European Rover Challenge.
A new team, a new rover. Every year.
- 2023
3D-printed rover in the press
FHNW students' Mars rover, built with 3D-printed parts, is featured in engineering and maker media.

- 2024
European Rover Challenge champions
The FHNW Rover Team wins the 10th (jubilee) edition of the European Rover Challenge in Krakow, Poland, scoring 2258.24 of a possible 3000 points with its rover "Hufi".

- 2025
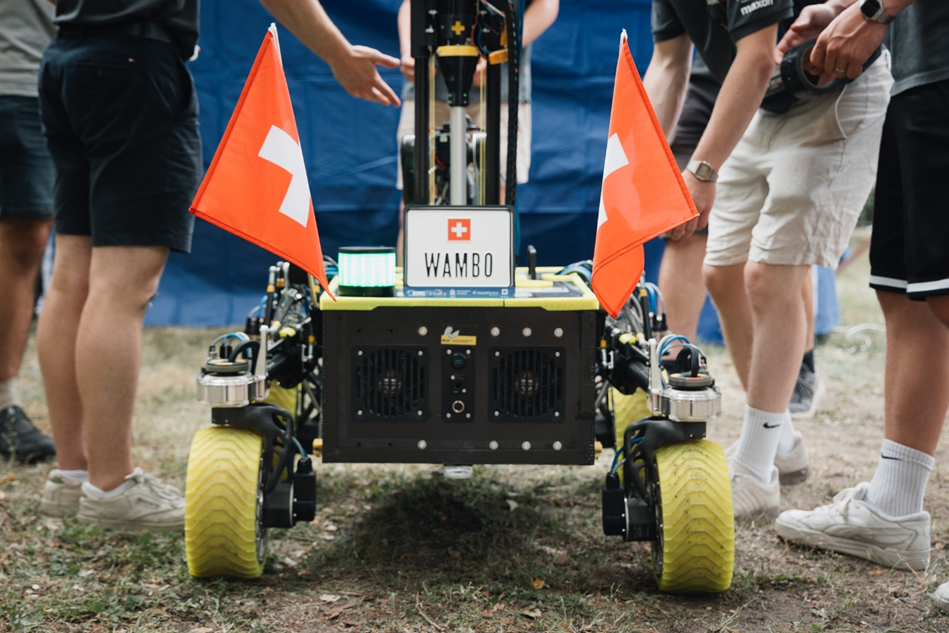
New rover "Wambo" competes at ERC
The team returns to the European Rover Challenge (29-31 August 2025, Krakow) with a newly developed rover named "Wambo", now including students from the School of Life Sciences for the first time.
- 2026
Qualified again for ERC
The FHNW Rover Team qualifies once more for the European Rover Challenge.
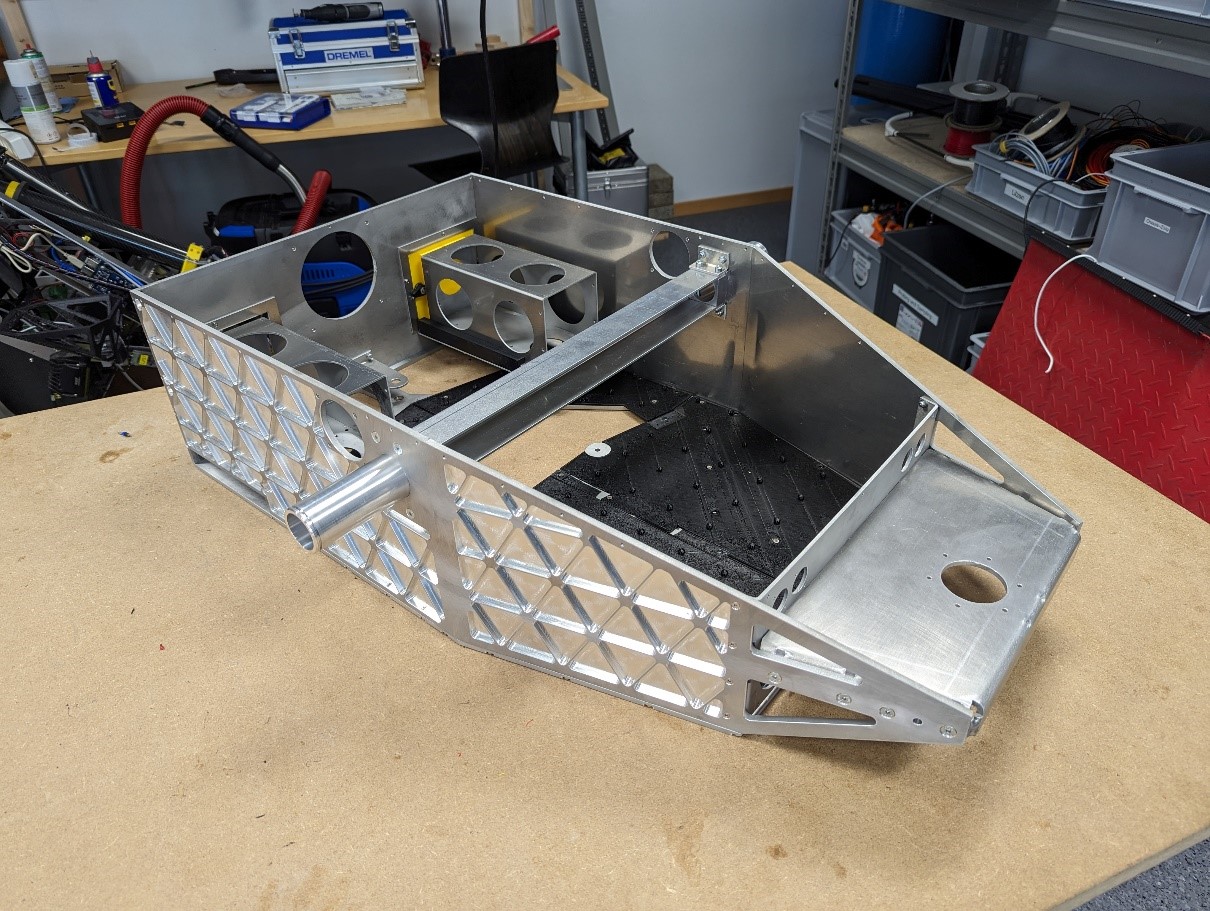
Built by hand, part by part.
Almost nothing on the rover is off-the-shelf. The chassis is machined in-house, the boards are designed and soldered by the team, and the software is written from the topic up.
-
 The CAN board“weCANt”, silkscreen and all
The CAN board“weCANt”, silkscreen and all -
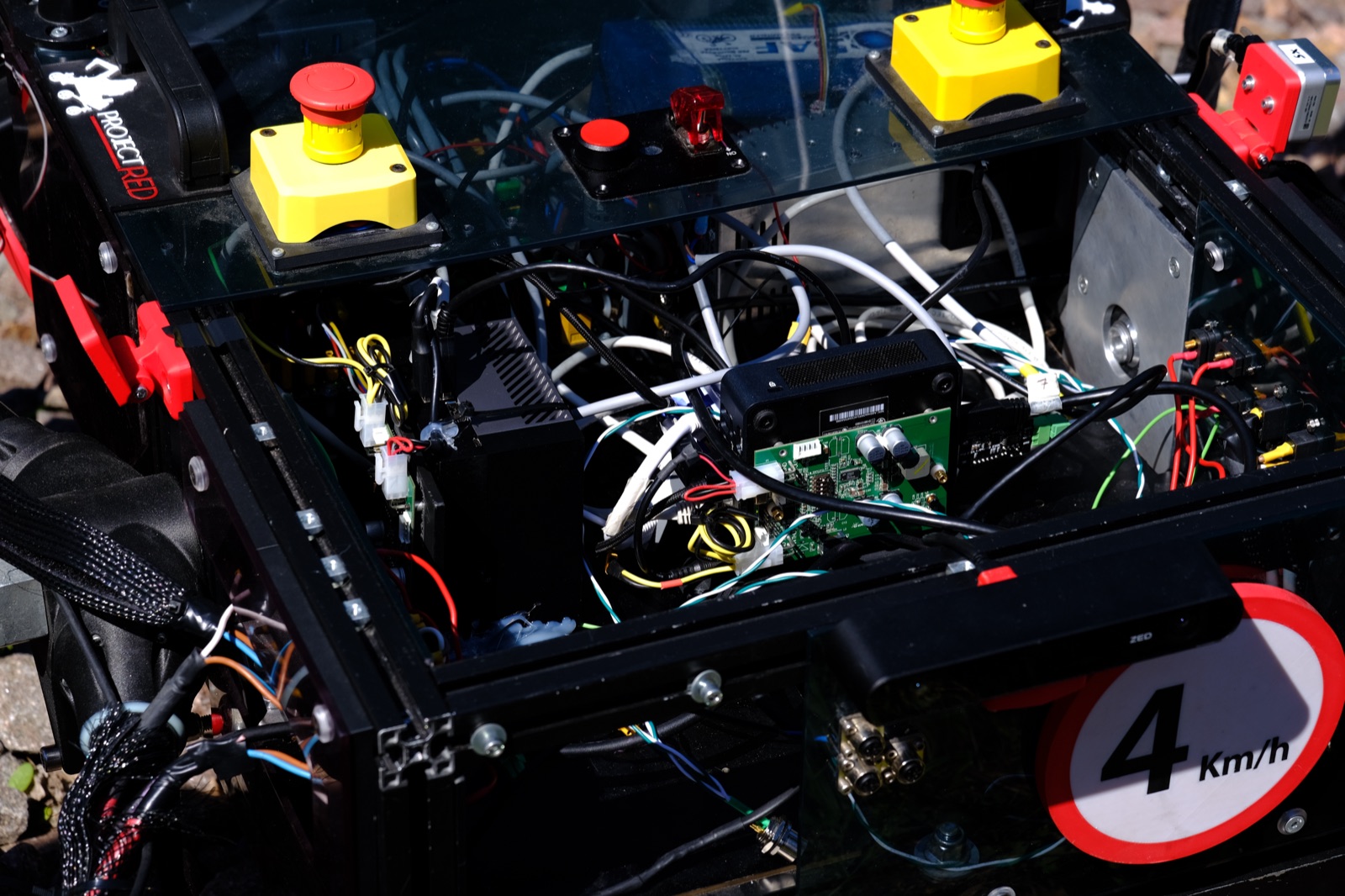 Wired by handLaced and labelled internals
Wired by handLaced and labelled internals -
 AssembledPopulated and wired
AssembledPopulated and wired -
 Task demoRunning the course for a crowd
Task demoRunning the course for a crowd

It finds its own way. In the dark.

It navigates by seeing.
On the Marsyard there's no satellite fix and no line of sight to the operators. The rover fuses stereo vision, LiDAR, an IMU and marker detection into one estimate of where it is — then plans its own route across a cost-map and drives it. In the dark.
- ZED stereo
- · Blickfeld Qb2 LiDAR
- · Hipnuc CH110 IMU
- · ArUco markers
- · Dijkstra cost-map
- · BehaviorTree.CPP

Build the next rover
with us.
Mechanical, electrical, software or science — every discipline has a seat at mission control. Students join for the project; sponsors help us get to Kraków.